
Divide and Truncate: A Penetration and Inversion Free Framework for Coupled Multi-physics Systems
Published in ACM SIGGRAPH 2026 Conference Proceedings, 2026
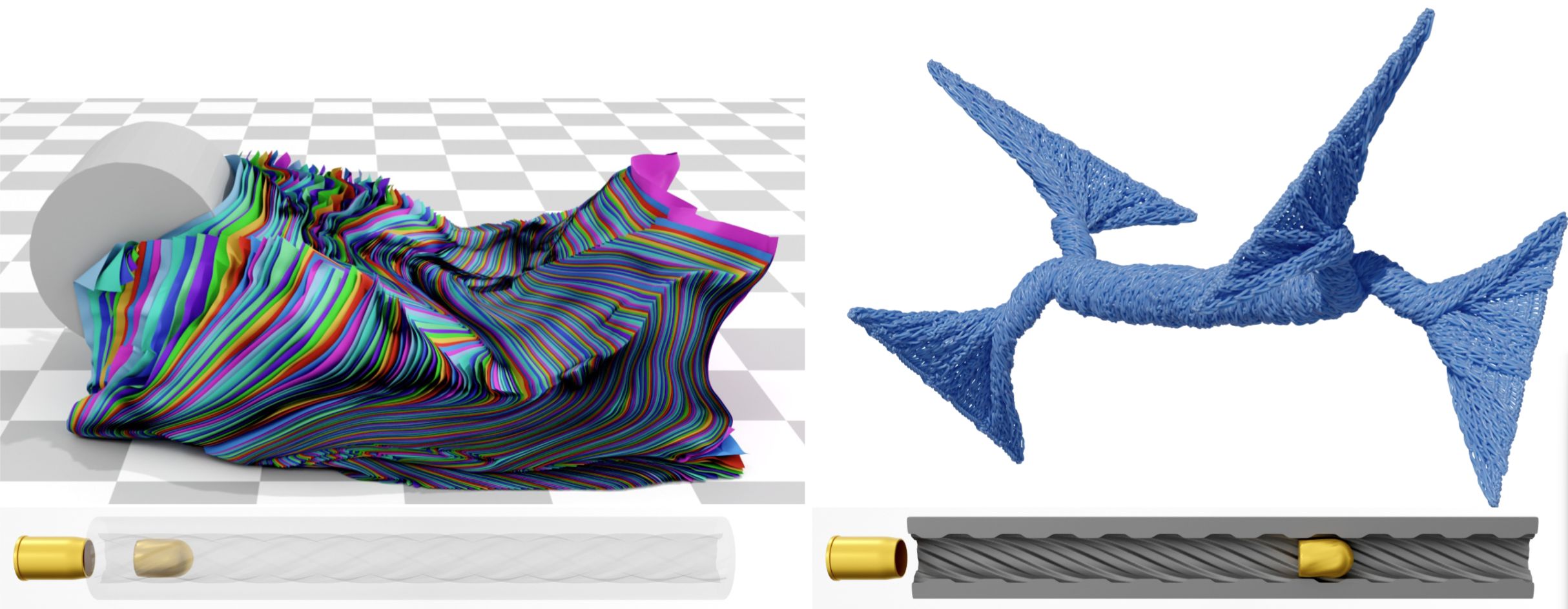
We introduce Divide and Truncate (DAT), a unified framework for penetration-free and inversion-free contact resolution in coupled multi-physics simulations. Our method accommodates a wide range of object types — including rigid bodies, soft volumetric objects, thin shells, rods, and animated elements — by dividing space into distinct zones and limiting movement within those boundaries to ensure penetration-free contact resolution.
We further present Planar-DAT, a refined variant that restricts only motion directed toward contact surfaces while allowing unrestricted tangential movement, addressing previous limitations involving artificial damping and system deadlock. DAT operates independently of material properties and can be applied as a post-processing step with any iterative optimizer, enabling efficient and robust simulation of complex multi-body interactions.
Links:
Recommended citation: Anka He Chen, Jerry Hsu, Youssef Ayman, Miles Macklin. (2026). "Divide and Truncate: A Penetration and Inversion Free Framework for Coupled Multi-physics Systems." ACM SIGGRAPH 2026 Conference Proceedings.
Download Paper
Leave a Comment