
About
About Me
I am currently a research scientist at NVIDIA specializing in physics-based simulation and physical AI. I got my PhD in Graphics from the University of Utah. My recent research concentrates on creating parallel solutions for implicit time integration, aiming to deliver robust and efficient strategies for handling elasticity, collisions, and the dynamics of rigid bodies. Additionally, I am investigating the use of deep learning methods to speed up the convergence of physics solvers. A significant portion of my research also includes developing high-resolution deformation capture systems. Those systems are designed to collect real-world data on non-rigid objects, facilitating the study of inverse physics problems. In summary, my work serves the goal of building infrastructure for Physical AI.
I am a member of the team that developed the Warp differentiable programming language and the Newton solver. Newton is a next-generation world simulator for physical AI that NVIDIA is actively developing. I am the creator and one of the principal developers of one of Newton’s core solvers: the VBD (Vertex Block Descent) solver. The VBD solver represents one of my principal contributions during my doctoral studies. It is a robust and parallel physics solver optimized for GPU architectures, capable of simulating coupled multiphysics systems including robots, soft bodies, cloth, cables, and rigid bodies. VBD achieves unprecedented precision and computational efficiency, establishing it as an ideal algorithm for constructing world simulators.
Explanation/pronunciation of My Name
Please don’t be confused by my first name, “He.” Although it looks like a pronoun, it is pronounced as “hə” (similar to “her” without the “r”), which means “prominent” in Chinese. However, I would greatly appreciate it if you could call me by my preferred name, Anka.
Education
PhD of Computing | University of Utah | 2019 - 2024
- Advisor: Prof. Cem Yuksel
- Focus: Computer Graphics, Physics-Based Animation
- Award: ACM SIGGRAPH / Eurographics Symposium on Computer Animation (SCA) 2025 Best Doctoral Dissertation Award
Master of Computational Mathematics | Dalian University of Technology | 2016 - 2019
- Graduated with Outstanding Master Graduation Thesis Award
Bachelor of Electrical Engineering — Hunan University — 2012 - 2016
Dissertation
Towards Realistic Real-Time Physics-Based Simulation PhD Dissertation, Kahlert School of Computing, The University of Utah, December 2024
- Award: ACM SIGGRAPH / Eurographics Symposium on Computer Animation (SCA) 2025 Best Doctoral Dissertation Award
- PDF (Low-Res, 7.9 MB)
- PDF (Full-Res, 65 MB)
Work Experience
Research Scientist | NVIDIA | July 2024 - Present - Focus: Physics-based simulation, Physical AI
Selected Publications (For the full list of my publications see here)
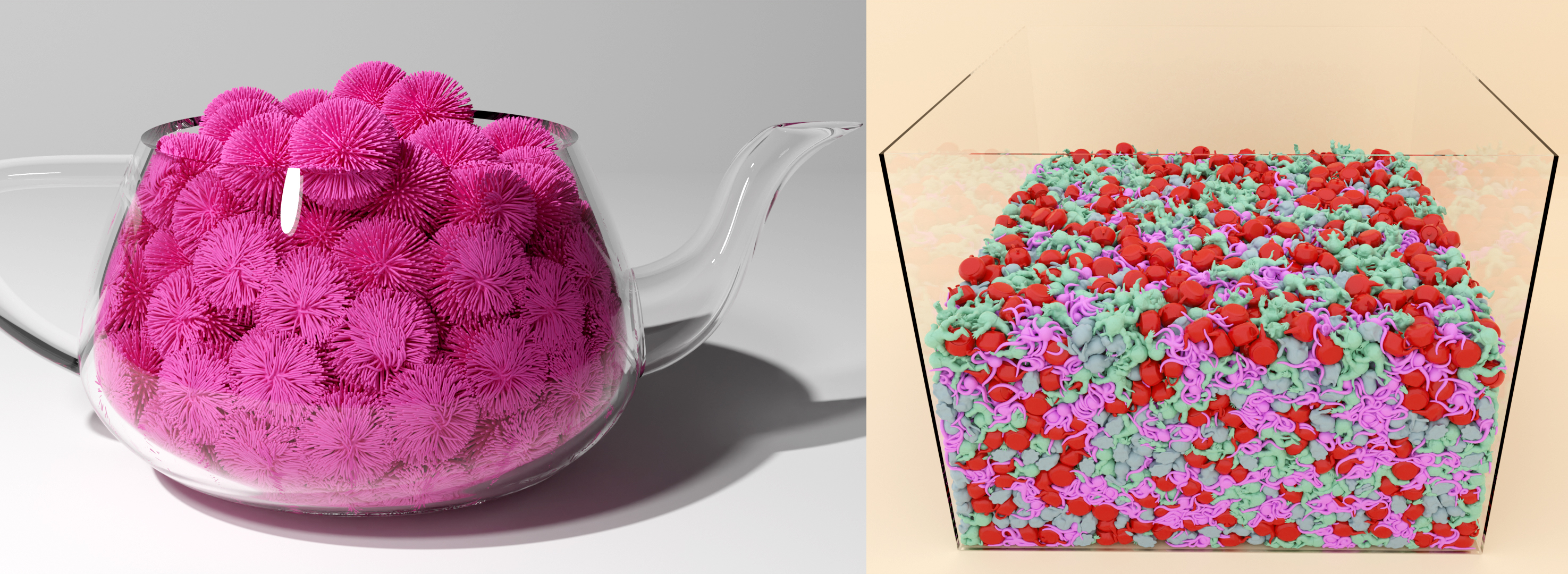
Divide and Truncate: A Penetration and Inversion Free Framework for Coupled Multi-physics Systems
ACM SIGGRAPH 2026 Conference Proceedings, 2026
A unified framework for penetration-free and inversion-free contact resolution across coupled multi-physics systems including rigid bodies, soft volumetric objects, thin shells, and rods. • PDF • ArXiv
Offset Geometric Contact
ACM Transactions on Graphics 44(4) [Proceedings of SIGGRAPH Asia], 2025
A novel contact model for guaranteed penetration-free simulation of codimensional objects with minimal computational overhead. • PDF • Project • Video

Isaac Lab: A Unified and Modular Framework for Robot Learning
arXiv preprint, 2025
A GPU-accelerated simulation framework for multi-modal robot learning built on NVIDIA Isaac Sim. • PDF • Project • GitHub
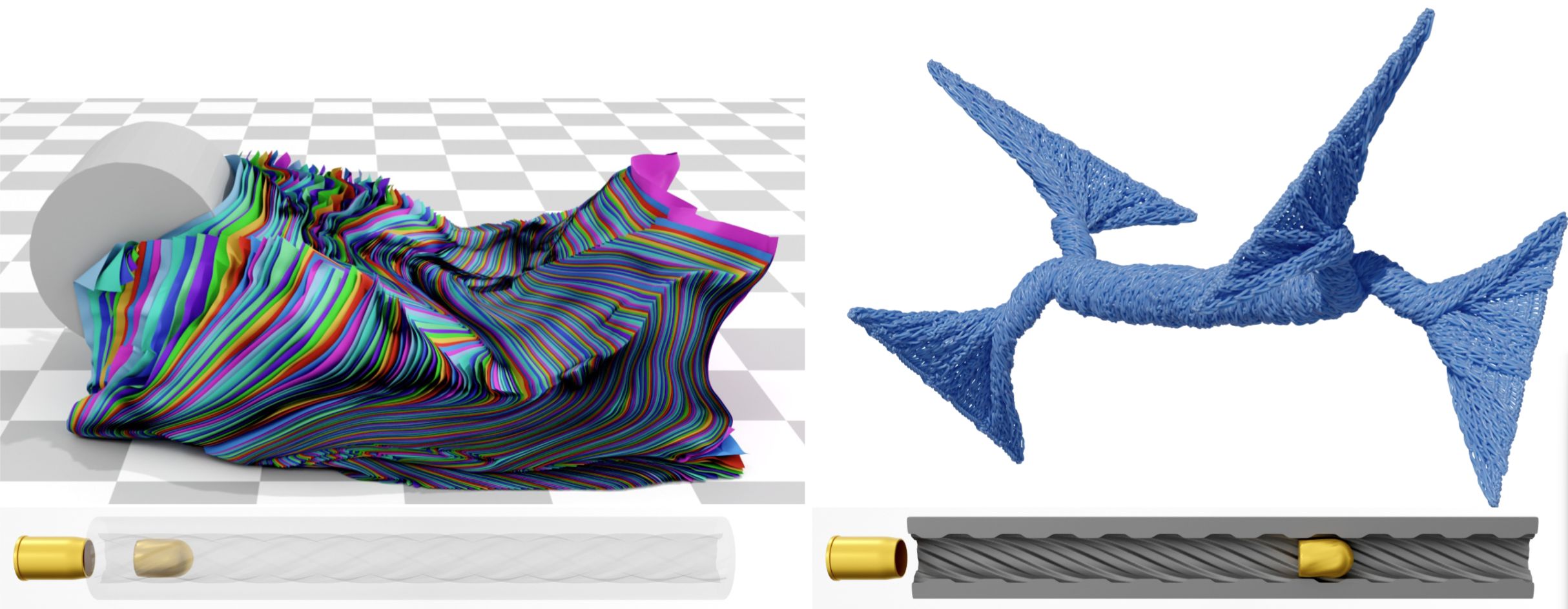
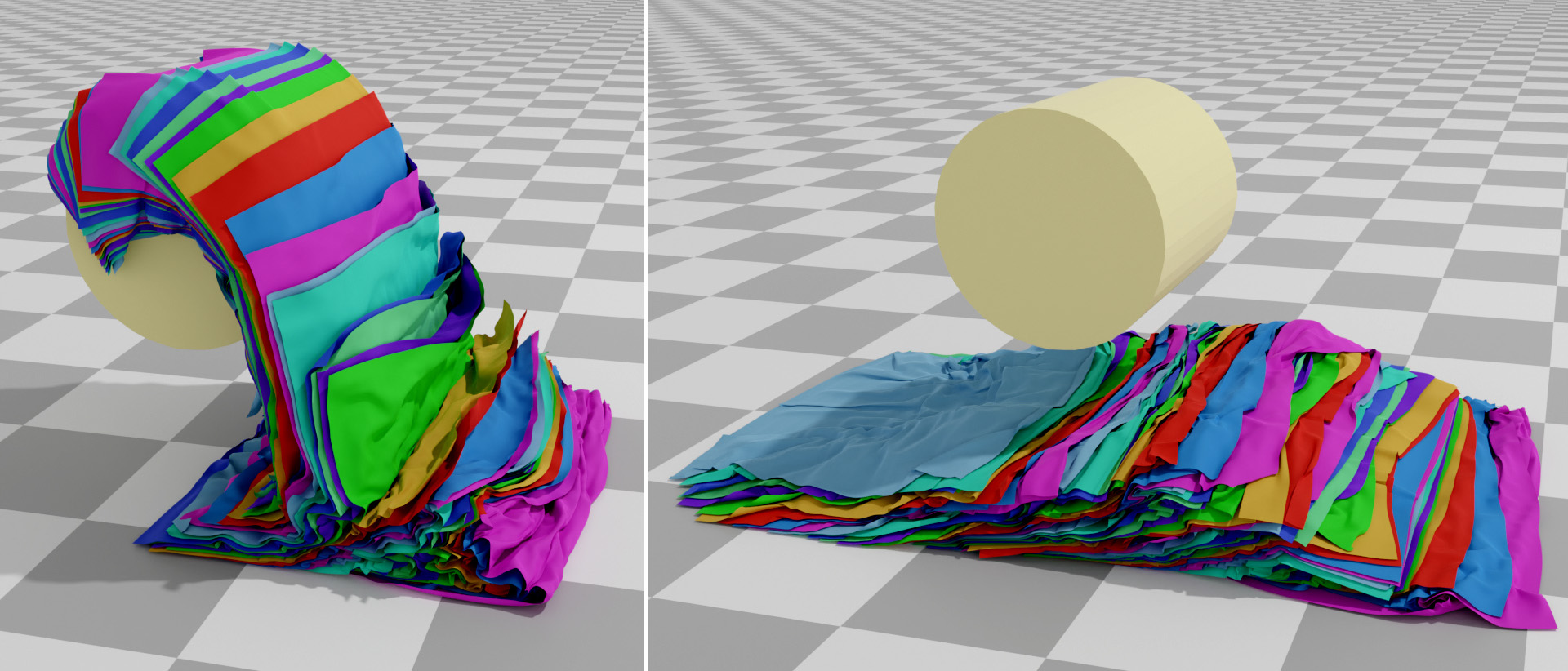
Vertex Block Descent
ACM Transactions on Graphics 43(4) [Proceedings of SIGGRAPH], 2024
A block coordinate descent solution for the variational form of implicit Euler through vertex-level Gauss-Seidel iterations. • PDF • Project • Video
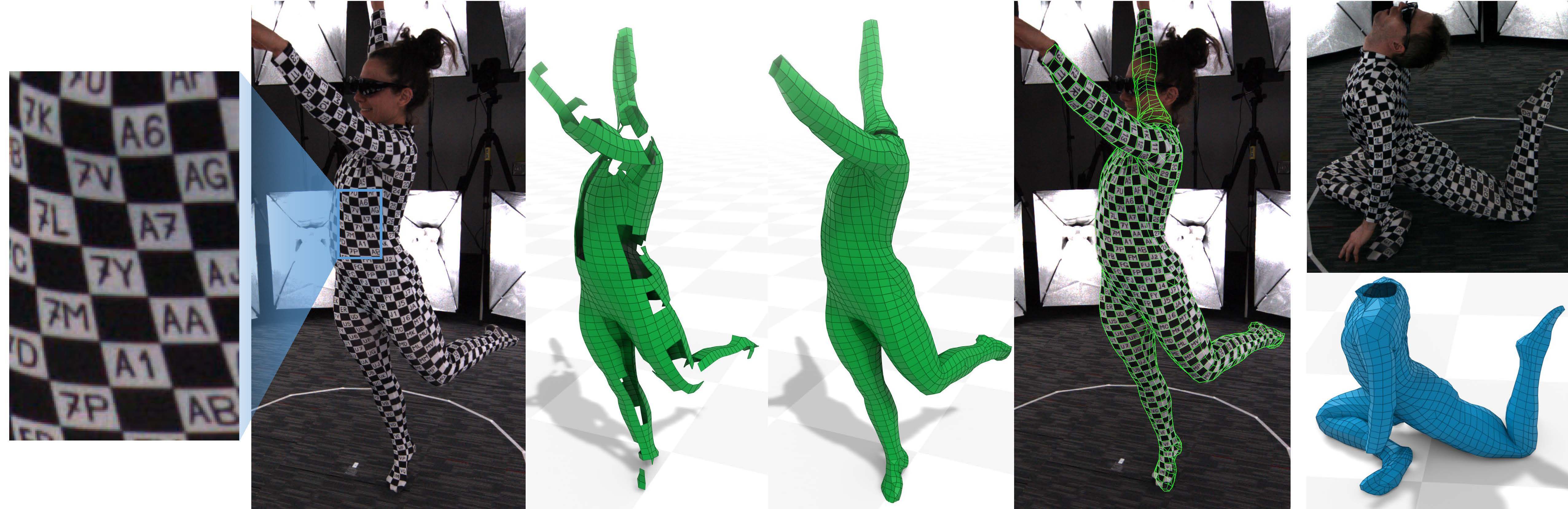
Capturing Detailed Deformations of Moving Human Bodies
ACM Transactions on Graphics 40(4) [Proceedings of SIGGRAPH], 2021
A method to capture over 1,000 unique points on the human body using only standard cameras and passive lights. • PDF • Project